Hardware Acceleration of Nonparametric Belief Propagation
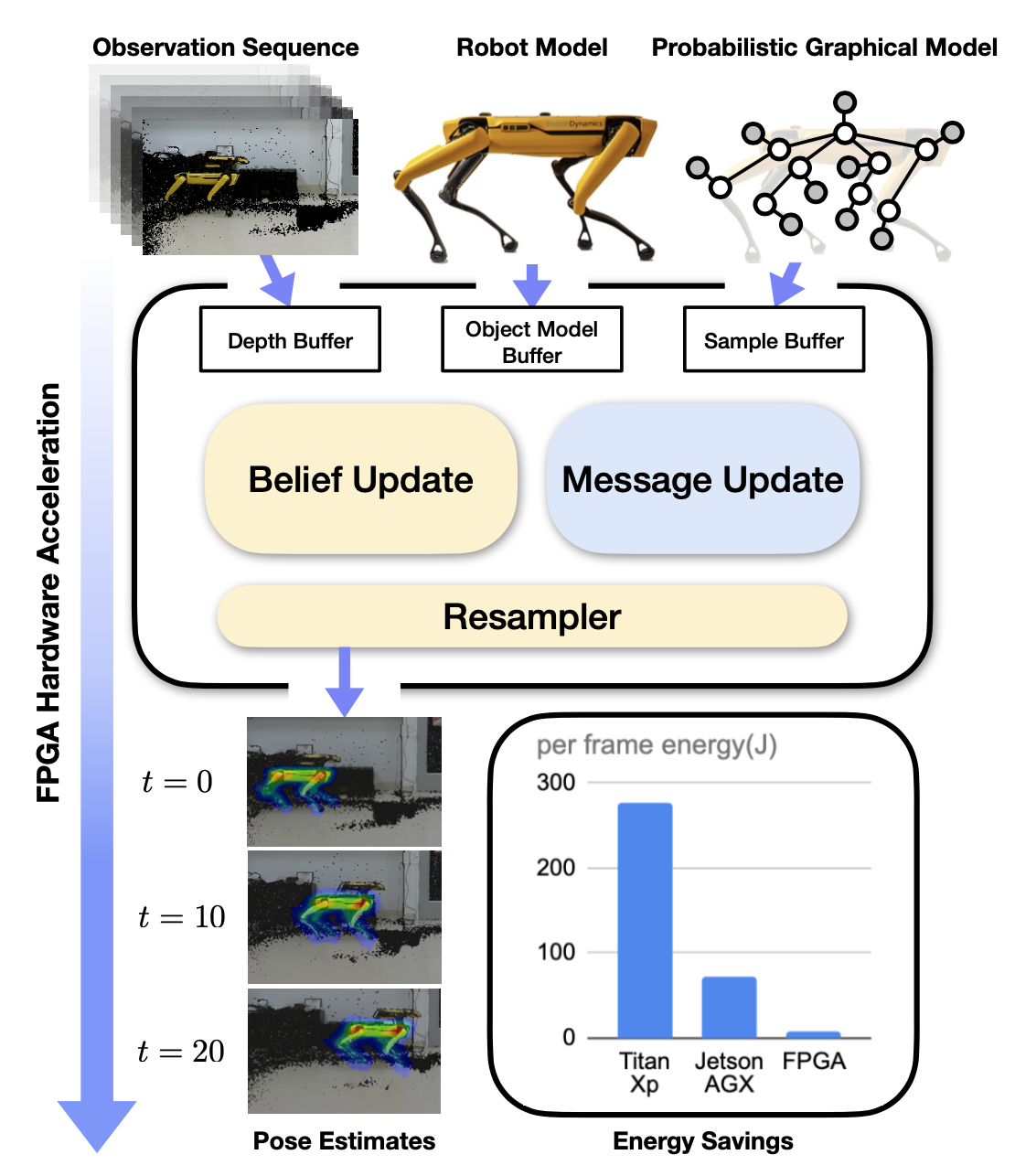
Perceiving the position and orientation of objects (i.e., pose estimation) is a crucial prerequisite for robots acting within their natural environment. We present a hardware acceleration approach to enable real-time and energy efficient articulated pose estimation for robots operating in unstructured environments. Our hardware accelerator implements Nonparametric Belief Propagation (NBP) to infer the belief distribution of articulated object poses. Our approach is on average, 26X more energy efficient than a high-end GPU and 11X faster than an embedded low-power GPU implementation. Moreover, we present a Monte-Carlo Perception Library generated from high-level synthesis to enable reconfigurable hardware designs on FPGA fabrics that are better tuned to user-specified scene, resource, and performance constraints.